Uno degli aspetti più importanti in ambito SAR è l’interpretazione dei dati tenendo presente le geometrie coinvolte in fase di acquisizione. I radar in telerilevamento hanno un sistema di osservazione chiamato side-looking, ovvero osservano la scena a terra lateralmente, mentre la maggior parte dei sistemi ottici guardano nella direzione del nadir. La differenza esiste perché gli strumenti ottici possono distinguere i target a terra in base alla loro distanza angolare dal sensore. Tuttavia, un radar è in grado di distinguerli solo in base ai loro ritorni, in base al tempo di arrivo di quest’ultimi.
Un radar che guarda al nadir non è in grado di distinguere tra due bersagli a e b (vedere la Figura 1) che giacciono a distanze uguali dal sensore, questo perché un singolo fronte d’onda incidente illumina entrambi i punti nello stesso istante, quindi i ritorni retrodiffusi da entrambi i punti arrivano all’antenna ricevente simultaneamente. Ciò porta a un’ambiguità nell’intervallo temporale per qualsiasi punto equidistante e simmetrico, ambiguità appunto che non permette al sensore di discernere correttamente la scena a terra .
Se l’illuminazione del radar è limitata a un lato della piattaforma, il fronte d’onda illumina gli stessi due punti in momenti diversi. I loro ritorni arriveranno al sensore separati nel tempo e dunque saranno distinguibili l’uno dall’altro.
 Fig.1 Down-looking vs Side-looking
Fig.1 Down-looking vs Side-looking
Le geometrie di un sistema radar sono diverse rispetto a quelle per la scansione comunemente impiegate per i sistemi ottici di telerilevamento. Similarmente ai sistemi ottici, la piattaforma si sposta in avanti nella direzione di volo (A) con il nadir (B) direttamente al di sotto della piattaforma. Il fascio d’impulsi a microonde viene trasmesso obliquamente alla direzione di volo ed illumina uno swath (C), il quale è lontano di un certo offset dal nadir. Il range (D) si riferisce alla dimensione accross-track perpendicolare al direzione di volo, mentre l’ azimuth (E) si riferisce alla dimensione parallela alla direzione di volo (Fig.1) [6].
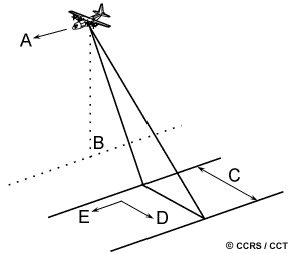
Fig.2 Geometrie per sensori ed aerei
La porzione di immagine appartenente allo swath più vicina al nadir si chiama near range (A), mentre la parte di swath più lontana dal nadir si chiama far range (B) (Fig.3).
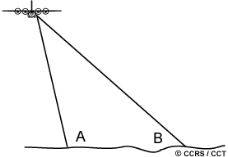
Fig.3 Near range e Far range
L’angolo di incidenza è l’angolo tra il fascio radar a terra e la superficie (A), esso aumenta, passando attraverso la strisciata da near al far range. L’angolo di vista (B) è l’angolo con cui il radar “guarda” alla superficie. Per tutti i range il radar misura la linea di vista radiale, ovvero distanza tra il radar e ciascun bersaglio sulla superficie. Questa è la distanza slant range (C). La distanza ground range (D) è la vera distanza orizzontale a terra di cui ogni punto è misurato in slant range (Fig.4).

Fig.4 Angolo d’incidenza, angolo di vista e distanze ground e slant range
Sono da considerare inoltre tre diverse effetti di distorsione dovute a rilievi (rilief displacement): di scorcio, layover e l’effetto ombreggiatura. Lo scorcio o foreshortening dipende dall’angolo di incidenza del fascio radar rispetto alla pendenza dell’oggetto da misurare. Quando l’impulso radar arriva alla base di un rilievo prima che sulla sommità può avvenire l’effetto scorcio, per cui la pendenza reale , misurata sulla slant appare compressa e l’ampiezza della distanza dalla base alla sommità non corretta. Il layover avviene quando l’impulso arriva prima alla sommità che alla base. il segnale di ritorno della sommità sarà ricevuto prima rispetto al segnale della base, come risultato si avrà una non corretta posizione della sommità rispetto alla base il risultato è definito radar shadow, e di fatto si manifesta quando il fascio non è in grado di illuminare l’intera superficie(Fig.5).
L’effetto di ombreggiatura o shadowing avviene in direzione ortogonale alla traccia, si presenta quando alcune superfici (facciate di edifici, montagne, ecc.) non contribuiscono a formare l’eco radar(Fig.6).
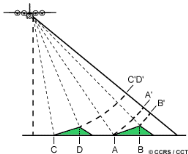
Fig.5 Foreshortening e Layover
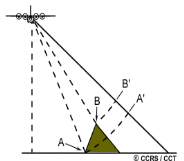


Fig.6 Effetto Shadowing
RIFERIMENTI