Un sistema radar osserva lateralmente la scena e registra le posizioni degli oggetti utilizzando la distanza tra il sensore e l’oggetto lungo la linea di vista. Un’immagine raccolta con questa geometria viene indicata come immagine in slant range. I dati slant hanno una distorsione geometrica sistematica nella direzione range. La vera dimensione dei pixel varia lungo la direzione ground range a causa della variazione degli angoli d’incidenza. A livello di visualizzazione ciò rende gli oggetti nel near range più ristretti rispetto alle loro dimensioni reali (Fig.1).
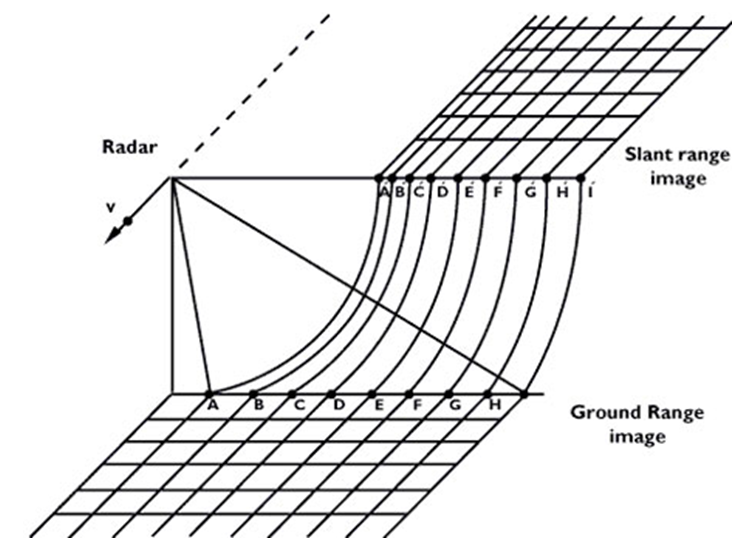
Fig.1 L’immagine in slant range con distorsione
I sistemi di elaborazione di immagini radar registrano le differenze dei tempi di spostamento tra i vari segnali di ritorno. La distanza tra un oggetto e l’antenna è uguale alla velocità di propagazione del segnale attraverso l’atmosfera, moltiplicato per il tempo necessario per raggiungere l’antenna. Questo, naturalmente, è il rapporto tra la velocità di radiazioni EM, il tempo impiegato e la distanza percorsa. Esiste anche un rapporto diretto tra slant range e ground range. Poiché gli angoli con cui le microonde vengono propagate sono noti, possiamo usare la trigonometria per calcolare il la coordinata ground range (Fig.2 e Fig.3 a e Fig.3b)
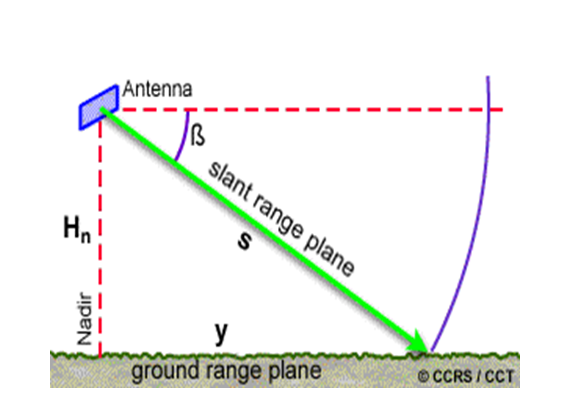
Fig.2.17 Visualizzazione Trigonometrica
Definiti :
Hn = altezza sensore
β = angolo di depressione
s = distanza in slant range
y = distanza ground range
si ottiene la seguente espressione:
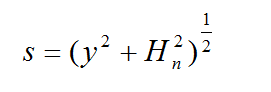
Facendo riferimento alla fig. 3a

Fig.3a Visualizzazione senza conversione
Operando una conversione trigonometrica è possibile “stirare” l’immagine mediante le seguenti espressioni:
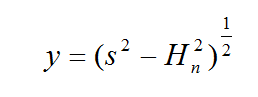

Facendo riferimento alla fig.2.18b, si ottiene l’immagine opportunamente convertita in Ground Range, lungo la direzione y:
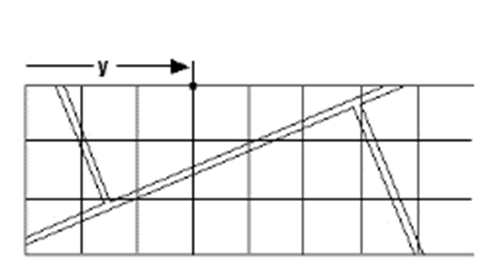
Fig.2.18 b Conversione trigonometrica